
Objetivos de última milla en la guerra de drones de Ucrania: IA, edge computing y los límites de la autonomía
- Benjamin Cook
- 15 ago 2025
- 8 Min. de lectura

Por Benjamín Cook
A medida que Ucrania es pionera en la guerra moderna de drones en condiciones de intensa guerra electrónica (EW), la última milla de la selección de objetivos, la distancia final antes de que un dron se enfrente a su objetivo, se ha convertido en un cuello de botella técnico y operativo decisivo. Este artículo examina cómo Ucrania utiliza la inteligencia artificial (IA), la computación periférica y los sistemas human-in-the-loop (HITL) para gestionar los objetivos de última milla en un espacio de batalla disputado. Explora el papel de la inferencia basada en el límite, la viabilidad operativa de los drones de fibra óptica y las limitaciones en función de los costos del reconocimiento automático completo de objetivos (ATR). El argumento es sencillo: si bien la IA ayuda en el seguimiento y la estabilización, las cargas económicas y técnicas de la autonomía total hacen del HITL la única opción escalable en el campo de batalla en la actualidad.
Introducción
Los drones se han convertido en un elemento central de la estrategia de defensa de Ucrania, permitiendo el reconocimiento, ajustando el fuego de artillería y llevando a cabo ataques de precisión. Uno de los aspectos más críticos y técnicamente desafiantes de la guerra con aviones no tripulados es la selección de objetivos en la última milla, es decir, los últimos segundos antes de que una munición llegue a su objetivo. En esta fase convergen la complejidad del entorno, la guerra electrónica y las limitaciones del sistema.
El desafío central es simple: la adquisición autónoma de objetivos a escala aún no es una realidad en el campo de batalla. Si bien la inteligencia artificial puede ayudar con el reconocimiento visual y la corrección de la trayectoria de vuelo, los sistemas actuales desplegados en Ucrania no pueden mantener o readquirir objetivos de manera consistente en condiciones del mundo real que incluyen suplantación de identidad, oclusión, movimiento rápido y ambigüedad visual.
En el ecosistema de drones FPV de Ucrania, el problema se ve agravado por la interferencia del GPS, la interferencia de RF y otros entornos de señal degradados, especialmente cerca de las líneas del frente. Estas condiciones interrumpen los enlaces de control remoto y limitan el conocimiento de la situación. Como resultado, muchos drones ucranianos están diseñados con un modelo human-in-the-loop (HITL), no porque los sistemas de IA dejen de funcionar, sino porque la fijación de objetivos totalmente autónoma no es económica o logísticamente viable a escala. HITL ofrece un compromiso escalable: la IA puede ayudar con la navegación o el seguimiento visual, pero los operadores humanos siguen siendo responsables de las decisiones finales de selección de objetivos.

A continuación, se examina cómo Ucrania se ha adaptado a estas limitaciones operativas. Comienza con un análisis técnico del uso de la IA en la identificación de objetivos y la estabilidad del vuelo, explora el despliegue de la computación periférica para procesar datos localmente en entornos con interferencia y contrasta esta arquitectura con el uso de drones de fibra óptica que evitan por completo los enlaces de RF. También evalúa la promesa y las limitaciones de los sistemas de reconocimiento automático de objetivos (ATR), que siguen estando limitados por los recursos informáticos, los ciclos de entrenamiento y la naturaleza adversa del campo de batalla.
La IA en la identificación y persistencia de objetivos
La inteligencia artificial desempeña un papel cada vez más importante en las operaciones de drones de Ucrania, especialmente en la adquisición de objetivos, la clasificación de objetos y el seguimiento de terminales. Contrariamente a las suposiciones populares, la IA no ofrece un compromiso autónomo. Se está utilizando tácticamente para aumentar el control humano durante la fase más exigente del vuelo: la aproximación final.
1. IA estrecha para tareas limitadas
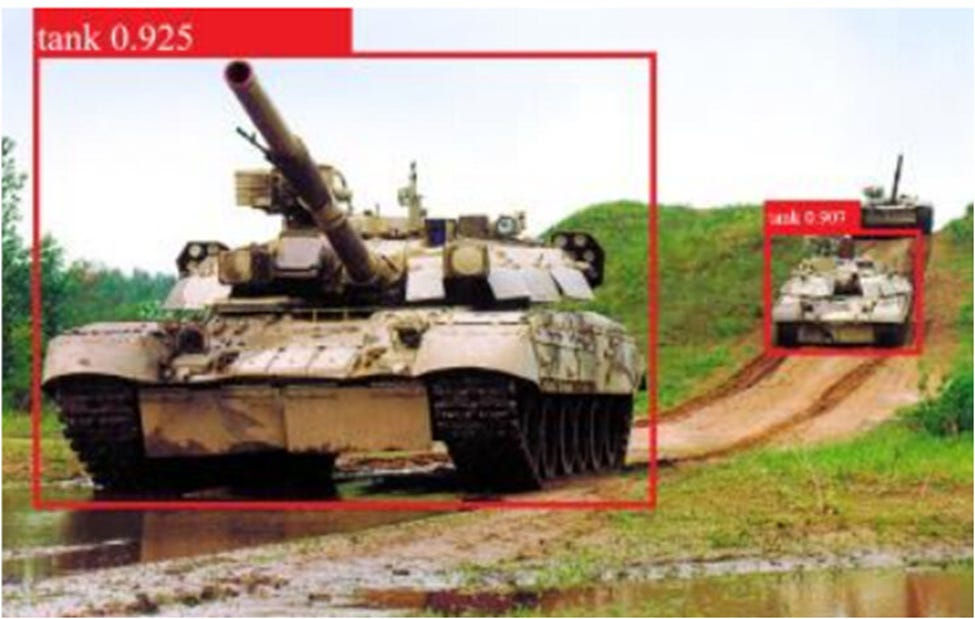
Los desarrolladores de drones ucranianos utilizan modelos ligeros y específicos para tareas diseñadas para ayudar, pero no reemplazar, al operador. La mayoría de las implementaciones se basan en versiones adaptadas de modelos como YOLO (You Only Look Once), ajustados a conjuntos de datos del campo de batalla para reconocer personal, vehículos y artillería desde cámaras FPV o ginball. Las herramientas de segmentación y clasificación de cuadros delimitadores permiten un etiquetado visual rápido de los posibles objetivos en diversas condiciones, como el desorden urbano, la nieve y el follaje.
Estos modelos no se ejecutan en la nube. Funcionan en dispositivos periféricos restringidos como Raspberry Pi, Jetson Nano o microordenadores personalizados, optimizados para la velocidad de inferencia, la eficiencia térmica y el consumo de energía. La atención se centra en la clasificación en tiempo real y el seguimiento visual, no en la autonomía.

Por lo general, no es factible entrenar estos modelos desde cero. En cambio, las unidades ucranianas afinan las arquitecturas de código abierto utilizando imágenes del campo de batalla y conjuntos de datos anotados limitados. Esto permite una implementación rápida, pero también impone restricciones en la complejidad y la generalización del modelo.
2. Persistencia del objetivo en la fase terminal
Uno de los usos más críticos de la IA se produce durante la segmentación de última milla, cuando un operador identifica un objetivo, a menudo colocando un cuadro delimitador o un marcador similar. En ese momento, la IA integrada se hace cargo, utilizando algoritmos de flujo óptico y correlación fotograma a fotograma para mantener el bloqueo durante la aproximación a alta velocidad o las oclusiones breves. Este traspaso reduce la carga de trabajo del piloto y permite correcciones finales más precisas, especialmente cuando la calidad de la señal de RF se degrada o cuando el terreno y el movimiento introducen ruido visual.
III. Edge Computing bajo las limitaciones del campo de batalla
El uso de la IA en la segmentación de la última milla depende totalmente de un requisito previo: la capacidad de procesar datos localmente. En el teatro ucraniano, los drones no pueden depender del acceso continuo a la nube, los servidores remotos o la computación externa. Los enlaces de RF no son fiables y los entornos con interferencia son la norma. Esto ha empujado a los desarrolladores de drones ucranianos hacia una arquitectura distribuida en la que la inferencia debe producirse en el límite, a bordo del propio dron.
1. ¿Por qué es necesario el edge computing?
Las operaciones ucranianas con drones se enfrentan a la denegación constante del GPS, a la interferencia de radiofrecuencia y a la pérdida ocasional de la transmisión de datos visuales. Incluso cuando se mantienen enlaces de RF, el ancho de banda es limitado y la latencia es impredecible. Estas condiciones descartan el procesamiento remoto o cualquier dependencia de bucles de retroalimentación de IA externos.
En su lugar, todas las funciones computacionalmente críticas (detección de objetos, seguimiento de objetivos, correcciones de navegación) deben ejecutarse a bordo. Esto permite que el dron mantenga la funcionalidad incluso cuando se producen caídas de señal o cuando el piloto está ejecutando a través de un retraso de video o apagones parciales.
2. Compensaciones de hardware y software
Los drones con capacidad perimetral están limitados por tres factores interrelacionados: disponibilidad de energía, limitaciones térmicas y recursos informáticos. Los drones equipados con IA integrada suelen utilizar microordenadores o módulos compactos que admiten marcos de inferencia como TensorFlow Lite u ONNX Runtime, reducidos para su implementación integrada.
Esto crea una compensación necesaria: los modelos deben ser lo suficientemente pequeños como para funcionar de manera eficiente sin sobrecalentar la placa, agotar la batería o retrasar los tiempos de respuesta. La detección de objetos de alta confianza puede requerir la omisión de fotogramas o una resolución reducida para mantener la capacidad de respuesta en tiempo real en un dron de maniobra.
IV. Drones controlados por fibra óptica: beneficios y limitaciones
Si bien la mayoría de los drones FPV ucranianos dependen de enlaces de radiofrecuencia (RF) para el control, existe una clase creciente de sistemas que operan con cables de fibra óptica para proporcionar una conexión física directa e ininterferible entre el operador y el dron. Estos sistemas son una respuesta directa al entorno cada vez más denso y sofisticado de la guerra electrónica (EW), particularmente en las zonas de primera línea donde la interferencia de RF es persistente y agresiva.
1. ¿Por qué se usa la fibra?
Los drones de fibra óptica evitan las vulnerabilidades de la comunicación inalámbrica. Debido a que transmiten señales de control a través de un medio físico, son efectivamente inmunes a la interferencia y la suplantación de RF, lo que los hace muy deseables para ataques de alta seguridad en áreas donde incluso las señales de video o comando de bajo ancho de banda se interrumpen. Además, los drones de fibra óptica pueden llegar a donde la segmentación de última milla simplemente no puede. Los drones de fibra pueden permanecer inactivos a la espera de un objetivo. Pueden arrastrarse lentamente a través de zanjas, casas y líneas de árboles. La segmentación de última milla asistida por IA no sería preferible en ninguno de estos escenarios.
2. Limitaciones operativas de los drones de fibra óptica
A pesar de su resistencia a las interferencias, los drones de fibra óptica tienen importantes limitaciones tácticas:
● Gestión de cables y arrastre: La mayoría de los drones de fibra óptica llevan un carrete a bordo y desenrollan el cable durante el vuelo. A medida que aumenta la distancia, también lo hace la masa del cable, lo que contribuye a la resistencia aerodinámica.
● Límites de agilidad: La correa física impone restricciones en el radio de giro, el control de cabeceo y la estabilidad de la velocidad, especialmente en entornos urbanos o terrenos desordenados.
● Peligros del terreno: En áreas con árboles, edificios o escombros, la línea de fibra en sí misma es un punto de falla. Los enganches o la fricción de las estructuras pueden cortar el cable, terminando el control a mitad de la misión.
No obstante, estos drones han demostrado alcances efectivos de hasta más de 20 kilómetros, dependiendo del diseño y el perfil de la misión.
V. Reconocimiento automático de objetivos (Automatic Target Recognition, ATR): capacidades, costos y limitaciones
El reconocimiento automático de objetivos (ATR) se refiere a la capacidad de un sistema para identificar, clasificar y priorizar objetivos de forma autónoma sin intervención humana durante el enfrentamiento. Si bien el ATR se utiliza en algunos sistemas occidentales de gama alta, su uso suele ser estrecho y de alcance estricto. Un claro ejemplo es el misil home-on-jam, que detecta y localiza emisiones electrónicas hostiles utilizando sensores a bordo. Esta es una forma de ATR, pero se basa en parámetros de señal definidos y lógica de participación binaria.
1. Lo que requiere ATR
Un ATR visual eficaz exige:
· Grandes conjuntos de datos de entrenamiento etiquetados representativos del entorno operativo.
· Importantes recursos informáticos para el entrenamiento de modelos y la inferencia en tiempo real.
· Pruebas y validaciones sólidas, a menudo en entornos dinámicos y engañosos.
· Integración de hardware en drones capaces de sostener inferencias sin sobrecalentarse ni agotar las baterías.
Estos requisitos son costosos, requieren mucho tiempo y son vulnerables a las interrupciones. No se adaptan bien a los miles de drones desechables que Ucrania construye y despliega cada mes.
2. Costo y flexibilidad
El entrenamiento de los sistemas ATR requiere canalizaciones de anotación que requieren un uso intensivo de humanos, computación segura y redundante, e iteración sostenida. Incluso cuando son factibles, estos sistemas son menos adaptables que un piloto humano. El ATR es inherentemente frágil, es decir, se confunde fácilmente por el camuflaje, la oclusión parcial o los cambios en la geometría del fondo.
Para un ejército que prioriza la adaptación, la velocidad y la rentabilidad, el ATR sigue siendo una mala compensación para la mayoría de los escenarios tácticos.
La única opción real
La selección de objetivos totalmente autónomos sigue estando fuera del alcance de la mayoría de los drones en el campo de batalla, no porque la tecnología subyacente sea imposible, sino porque aún no es económica o logísticamente viable a escala. Ucrania ha adoptado un modelo más pragmático: los operadores humanos realizan la tarea más sensible y propensa a errores, el reconocimiento de objetivos, mientras que los drones ejecutan el seguimiento y la orientación terminal. Estas funciones integradas se basan en algoritmos y métodos que han existido durante décadas, incluido el flujo óptico, la diferenciación de fotogramas y la persistencia de cuadros delimitadores. Requieren mucha menos potencia computacional y pueden ejecutarse de manera confiable en hardware perimetral restringido. Esta arquitectura refleja una división deliberada del trabajo: el ser humano maneja lo que aún no se puede automatizar de manera segura o asequible, y la máquina maneja lo que sí puede.


